Transfer Learning from Play and Language - Nailing the Baseline
March 2, 2021
A collection of experiments
March 2, 2021
December 30, 2020

June 11, 2020

June 3, 2020

March 20, 2020
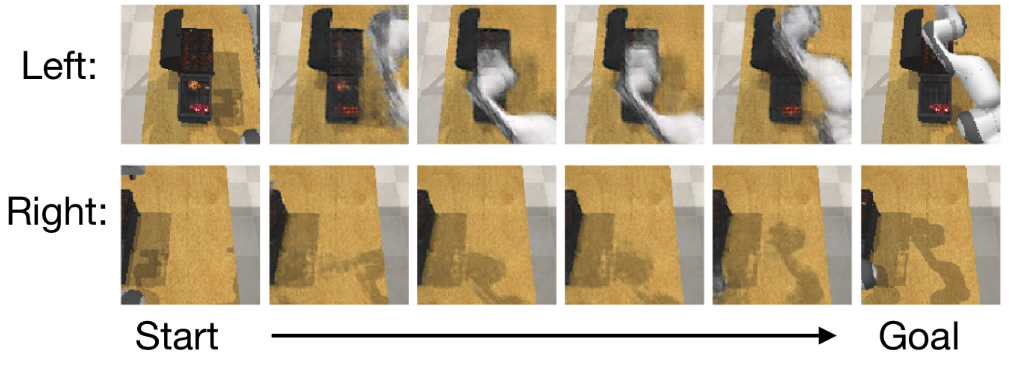
Recently I found a way to learn state representations such that linear interpolation between the latent representations of states provided near optimal trajectories between the states in the original set of dimensions. They are learnt by optimising the representations of expert trajectories to lie along lines in higher dimensional latent space. The hard problem of finding the best path between states is reduced to the simple problem of taking a straight line between the latent representations of states - and the complexity is wrapped in the mapping to and from the latent space. This even worked for image based object manipulation tasks, and might be an interesting way to approach sub-goal generation for temporally extended manipulation tasks or provide a dense reward metric where latent Euclidean distance is a ‘true’ measure of progress towards the goal state.